A network of satellites that continuously transmit coded information, which makes it  possible to precisely identify locations on earth by measuring the distance from the satellites.
possible to precisely identify locations on earth by measuring the distance from the satellites.
As stated in the definition above,
GPS stands for Global Positioning System and refers to a group of U.S. Department of Defense satellites constantly circling the earth. The satellites transmit very low power radio signals allowing anyone with a GPS receiver to determine their location on Earth
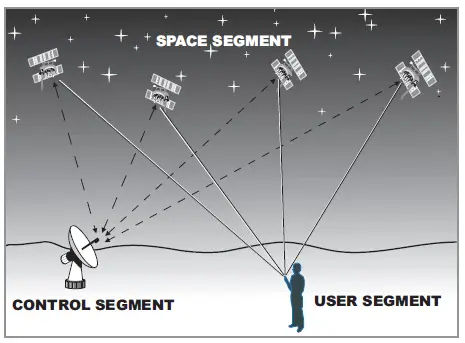
The 3 Segments of GPS
The NAVSTAR system (the acronym for Navigation Satellite Timing and Ranging, the official U.S. Department of Defense name for GPS) consists of:
- a space segment (the satellites),
- a control segment (the ground stations), and
- a user segment (you and your GPS receiver

The Space Segment
The space segment, which consists of at least 24 satellites (21 active plus 3 operating spares) is the heart of the system. The satellites are in what’s called a “high orbit” about 12,000 miles above the Earths surface. Operating at such a high altitude allows the signals to cover a greater area. The satellites are arranged in their orbits so a GPS receiver on earth can always receive from at least four of them at any given time.
The satellites are travelling at speeds of 7,000 miles an hour, which allows them to circle the earth once ever)’ 12 hours. They are powered by solar energy and are built to last about 10 years. If the solar energy fails (eclipses, etc.), they have backup batteries onboard to keep them running. They also have small rocket boosters to keep them flying in the correct path.
The first GPS satellites were launched into space in 1978. A full constellation of 24 satellites was achieved in 1994, completing the system. Money is in the U.S. Department of Defense budget to continue buying new satellites, sending them up to keep the system running for years to come.
Each satellite transmits low power radio signals on several frequencies (designated LI, L2, etc.). Civilian GPS receivers “listen” on the LI frequency of 1575.42 MHz in the UHF band. The signal travels “line of sight”, meaning it will pass through clouds, glass and plastic, but will not go through most solid objects such as buildings and mountains.
To give you some idea of where the LI signal is on the radio dial, your favourite FM radio station broadcasts on a frequency somewhere between 88 and 108 MHz (and sounds much better!). The satellite signals are also very low power signals, on the order of 20-50 watts. Your local FM radio station is around 100,000 watts. Imagine trying to listen to a 50-watt radio station transmitting from 12,000 miles away! That’s why it’s important to have a clear view of the sky when using your GPS.
LI contains two “pseudorandom” (a complex pattern of a digital code) signals, the Protected (P) code and the Coarse/Acquisition (C/A) code. Each satellite transmits a unique code, allowing the GPS receiver to identify the signals. “Anti-spoofing” refers to the scrambling of the P-code in order to prevent its unauthorized access. The P-code is also called the “P (Y)” or “Y” code.
The main purpose of these coded signals is to allow for calculating the travel time from the satellite to the GPS receiver on the Earth. This travel time is also called the Time of Arrival. The travel time multiplied by the speed of light equals the satellite range (distance from the satellite to the GPS receiver). The Navigation Message (the information the satellites transmit to a receiver) contains the satellite orbital and clock information and general system status messages and an ionospheric delay model. The satellite signals are timed using highly accurate atomic clocks.
The Control Segment
The “control” segment does what its name implies — it “controls” the GPS satellites by tracking them and then providing them with corrected orbital and clock (time) information. There are five control stations located around the world — four unmanned monitoring stations and one “master control station”. The four unmanned receiving stations constantly receive data from the satellites and then send that information to the master control station. The master control station “corrects” the satellite data and, together with two other antenna sites, sends (“uplinks”) the information to the GPS satellites.
The User Segment
The user segment simply consists of you and your GPS receiver. As mentioned previously, the user segment consists of boaters, pilots, hikers, hunters, the military and anyone else who wants to know where they are, where they have been or where they are going.
How does GPS Works?
Lets first look at how the GPS receiver knows where the satellites are located in space. The GPS receiver picks up two kinds of coded information from the satellites. One type of information, called “almanac” data, contains the approximate positions (locations) of the satellites. This data is continuously transmitted and stored in the memory of the GPS receiver so it knows the orbits of the satellites and where each satellite is supposed to |be. The almanac data is periodically updated with new information as the satellites move around.
Any satellite can travel slightly out of orbit, so the ground monitor stations keep track of the satellite orbits, altitude, location, and speed. The ground stations send the orbital data to the master control station, which in turn sends corrected data up to the satellites. This corrected and exact position data is called the “ephemeris” (pronounced: i-’fe-me-res) data, which is valid for about four to six hours, and is transmitted in the coded information to the GPS receiver.
So, having received the almanac and ephemeris data, the GPS receiver knows the position (location) of the satellites at all times.
Time is of the Essence
Even though the GPS receiver knows the precise location of the satellites in space, it still needs to know how far away the satellites are (the distance) so it can determine its position on Earth. There is a simple formula that tells the receiver how far it is from each satellite:
Your distance from a given satellite object equals the velocity of the transmitted signal multiplied by the time it takes the signal to reach you (Velocity x Travel Time = Distance).
Remember as a kid how you could find out how far a thunderstorm was from you? When you saw a lightning flash you counted the number of seconds until you heard the thunder. The longer the count, the further away the storm was. GPS works on the same principle, called “Time of Arrival”.
Using the same basic formula to determine distance, the receiver already knows the velocity. It’s the speed of a radio wave — 186,000 miles per second (the speed of light), less any delay as the signal travels through the Earth atmosphere.
Now the GPS receiver needs to determine the time part of the formula. The answer lies in the coded signals the satellites transmit. The transmitted code is called “pseudo-random code” because it looks like a noise signal. When a satellite is generating the pseudo-random code, the GPS receiver is generating the same code and tries to match it up to the satellites code. The receiver then compares the two codes to determine how much it needs to delay (or shift) its code to match the satellite code. This delay time (shift) is multiplied by the speed of light to get the distance.
Your GPS receiver clock does not keep the time as precisely as the satellite clocks. Putting an atomic clock in your GPS receiver would make it much larger and far too expensive! So each distance measurement needs to be corrected to account for the GPS receiver’s internal clock error. For this reason, the range measurement is referred to as a “pseudo-range”. To determine position using pseudo-range data, a minimum of four satellites must be tracked and the four fixes must be recomputed until the clock error disappears.
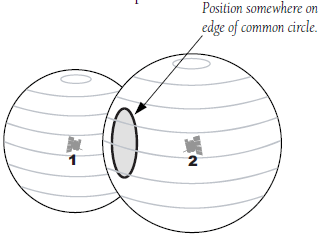
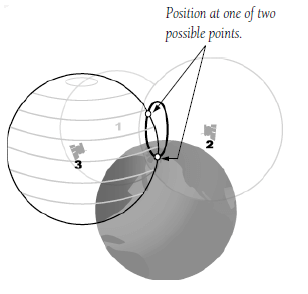
Coming Full Circle
Now that we have both satellite location and distance, the receiver can determine a position. Let’s say we are 11,000 miles from one satellite. Our location would be somewhere on an imaginary’ sphere that has the satellite in the center with a radius of 11,000 miles. Then let’s say we are 12,000 miles from another satellite. The second sphere would intersect the first sphere to create a common circle. If we add a third satellite, at a distance of 13,000 miles, we now have two common points Even though there are two possible positions, they differ greatly in latitude/longitude position AND altitude. To determine which of the two common points is your actual position, you’ll need to enter your approximate altitude into the GPS receiver. This will allow the receiver to calculate a two-dimensional position (latitude, longitude). However, by adding a fourth satellite, the receiver can determine your three-dimensional position (latitude, longitude, altitude). Let’s say our distance from a fourth satellite is 10,000 miles. We now have a fourth sphere intersecting the first three spheres at one common point.
Almanac Data
The unit stores data about where the satellites are located at any given time. This data is called the almanac. Sometimes when the GPS unit is not turned on for a length of time, the almanac can get outdated or “cold”.
When the GPS receiver is “cold”, it could take longer to acquire satellites. A receiver is considered “warm” when the data has been collected from the satellites within the last four to six hours. When you’re looking for a GPS unit to buy, you may see “cold” and “warm” acquisition time specifications. If the time it takes the GPS unit to lock on to the signals and calculate a position is important to you, be sure to check the acquisition times.
Once the GPS has locked onto enough satellites to calculate a position, you are ready to begin navigating! Most units will display a position page or a page showing your position on a map (map screen) that will assist you in your navigation.
Errors of GPS
1. Ionospheric and Tropospheric delay: Due to the radio waves radiated by the satellite when passing through the different layers of the ionosphere and troposphere, the velocity of the waves vary which affects the time difference measurement and the fix will not be accurate.
2. Users clock error, if the user clock is not perfectly synchronized with the satellite’s clock, the range measurement will not be accurate and the range measurement along with the clock error is known as the pseudo range. This error can be eliminated within the receiver on board by obtaining the pseudo range from three satellites and is done automatically within the receiver.
3. Satellite clock error: This error is caused due to the error in the satellite’s clock with respect to GPS time. This is monitored by .the ground-based segments and any errors in the satellite’s clock forms part of the 30 seconds navigational message.
4. Geometric dilution of precision: The geometry of the position of the satellite determines the angle of cut which in turns governs the quality of the position obtained. Wider the angular separation between the satellites, more accurate is the fix as the intersection will be almost at right angles.
The lower the GDOP value higher the accuracy of the fix and this GDOP value is indicated on the display unit.
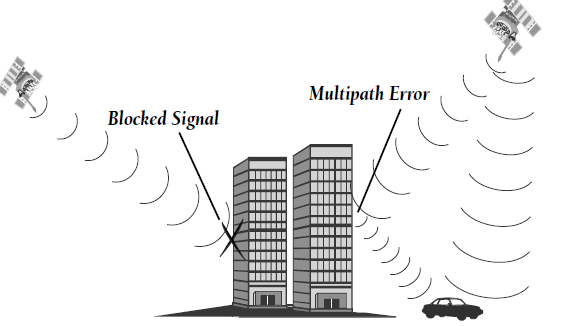
5. Multipath error This error is caused by satellite signals arriving at the ship’s antenna both directly from the satellite and having reflected by some other objects.
6. Deviation of the satellite from the predicted path: The satellites are monitored and their paths are predicted by ground-based segment. However between two consecutive monitoring of the same satellites, there may be minor drifts from their predicted paths resulting in small position inaccuracy.
DGPS (Differential GPS)
Differential GPS: the system is used to enhance the accuracy of the normal GPS system so that it can be used for survey, drilling, oceanography etc. Where higher accuracy of position fixing is required.
The DGPS reference station is situated at a fixed location and from this position the GPS receiver tracks all the satellite within its site, obtains data from them and computes the correction based on the position obtained from the GPS and its actual position. These corrections are then broadcast to GPS user’s to improve their positional accuracy.
The fundamental principle of DGPS is the comparison of fixed point, referred to as the reference station with position obtained from a GPS receiver at that point.
Since the reference station knows its exact location, it can determine the errors in the satellite signals. It does this by measuring the ranges to each satellite using the signals received and comparing these measured ranges to the actual ranges calculated from its known position. The difference between the measured and calculated range or each satellite in view becomes a “differential correction”.  The differential corrections for each tracked satellite are formatted into a correction message and transmitted to DGPS receivers. These differential corrections are then applied to the GPS receiver’s calculations, removing many of the common errors and improving accuracy. The level of accuracy obtained is a function of the GPS receiver and the similarity of its “environment” to that of the reference station, especially its proximity to the station. The reference station receiver determines the error components and provides corrections to the GPS receiver in real time. Corrections can be transmitted over FM radio frequencies, by satellite, or by beacon transmitters maintained by the U.S. Coast Guard. Typical DGPS accuracy is 1-5 meters (about 3-16 feet).
The differential corrections for each tracked satellite are formatted into a correction message and transmitted to DGPS receivers. These differential corrections are then applied to the GPS receiver’s calculations, removing many of the common errors and improving accuracy. The level of accuracy obtained is a function of the GPS receiver and the similarity of its “environment” to that of the reference station, especially its proximity to the station. The reference station receiver determines the error components and provides corrections to the GPS receiver in real time. Corrections can be transmitted over FM radio frequencies, by satellite, or by beacon transmitters maintained by the U.S. Coast Guard. Typical DGPS accuracy is 1-5 meters (about 3-16 feet).

Leave a Reply