
Doppler log is an instrument, used in ships, to measure ship’s relative speed with water (in which it is travelling) by the use of Doppler effects on transmitted/reflected sound waves.

Display of a dual axis Doppler speed log which shows the vessels movement in the Fore and Aft as well as the Athwartship direction.
Principle
 Doppler log is based on the principle of Doppler shift in frequency measurement i.e. apparent change in frequency received when the distance between source and observer is changing due to the motion of either source or observer or both. In Doppler log an observer is moving with a source of sound towards a reflecting plane, then the received frequency. By measuring the received frequency and knowing the value of transmitted frequency and velocity of sound in seawater, the speed of the vessel can be determined.
Doppler log is based on the principle of Doppler shift in frequency measurement i.e. apparent change in frequency received when the distance between source and observer is changing due to the motion of either source or observer or both. In Doppler log an observer is moving with a source of sound towards a reflecting plane, then the received frequency. By measuring the received frequency and knowing the value of transmitted frequency and velocity of sound in seawater, the speed of the vessel can be determined.
Working
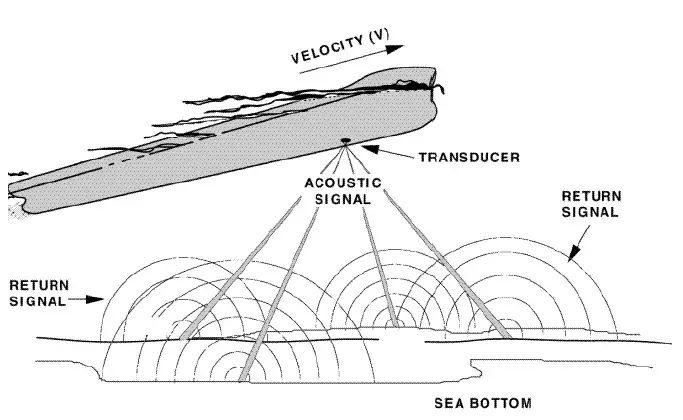
A transducer is fitted on the ship’s keel which transmits a beam of the acoustic wave at an angle usually 60° to the keel in the forward direction. The beam is bounced off the seabed or layer of the water and received back at the transducer. The difference in frequency between the transmitted and received signals is measured and is proportional to the speed of the ship.
The principle of Doppler Speed Log & the Janus configuration of the transducer
Speed over ground & Speed over water
Generally, Doppler log can receive echoes from seabed only up to depths of 200 meters or so. However, beyond these depths, a weaker echo is available from a layer between 10 to 30 metres below the keel. The speed of the vessel can be determined as earlier but in this case, it will be with respect to this layer and not with respect to ground. This is called “speed over water” similar to that obtained from other types of logs mentioned earlier. In this case, the effect of current has to be allowed for to get the speed made good but the reflections from a layer deep down eliminate the effect of disturbances caused by the vessel itself and the effect of surface currents caused by wind and wave motion.
When the signal of echo sounder is bounced off the seabed, the speed indicated will be in relation to the fixed seabed and will, therefore, be speed over the ground.
Athwartship Speed
The unique feature of some of the Doppler log is to provide athwartship speed over ground, which was never possible by any other logs. To measure the athwartship speed, additional transducers are employed. These are called dual axis speed logs.
The introduction of Doppler log has brought about a tremendous change in the outlook and approach of Masters and officers at sea. Navigators who never looked at nor had any respect for the speed indicated by older logs are using accurate speed and drift indicated by Doppler to their advantage in all their manoeuvres. Safety of navigation can be improved considerably if all ships were equipped with an operational Doppler log.
Errors of the Doppler log
- Error in transducer orientation: The transducers should make a perfect angle of 60° with respect to the keel or else the speed indicated will be inaccurate.
- Errors in oscillator frequency: The frequency generated by the oscillator must be accurate and constant, any deviation in the frequency will result in the speed indicated being in error.
- Error in propagation velocity of the acoustic wave: The velocity of the acoustic wave at the temperature of 16°c and salinity of 3.4% is 1505m/sec, but generally it is taken as 1500m/sec for calculation. This velocity changes with temperature, salinity or pressure.
- Errors due to ship’s motion: during the interval between transmission and reception, the ship may marginally roll or pitch and thereby the angle of transmission and reception can change and for a two degree difference between the angle of transmission and reception, the net effect wiH be an error of 0.10% of the indicated speed which is marginal and can be neglected.
- Errors due to the effect of rolling and pitching: The effect of pitching will cause an error in the forward speed, but it has no effect on the athwartship speed. Similarly, rolling will cause an error in athwartship, but not in forward speed.
- Errors due to inaccuracy in the measurement of comparison frequency: The difference in the frequencies received by the forward and aft transducers must be measured accurately as any error in this will be directly reflected in the speed of the vessel.
- Error due to sidelobe: When the side lobe reception dominates over the main beam reception, there will be an error in the speed indicated. This error is more pronounced on a sloppy bottom, where the side lobe will be reflected at a more favourable angle and will have path length less than the main beam.
The standard terminology is STW (Speed Through Water) and SOG (Speed Over Ground)